

Creating Phantom Arteries for Robotic Surgery
Published: 16 April 2021
In order to train robotic systems we need to create models that mimic real-life, like arteries within organs.
One theme of the Ultrasurge programme is developing robotic platforms from which the miniature surgical tools will be manipulated within the body. The robots need to be able to sense their surroundings, detecting tumours for removal, or avoiding sensitive areas like arteries and other blood vessels.
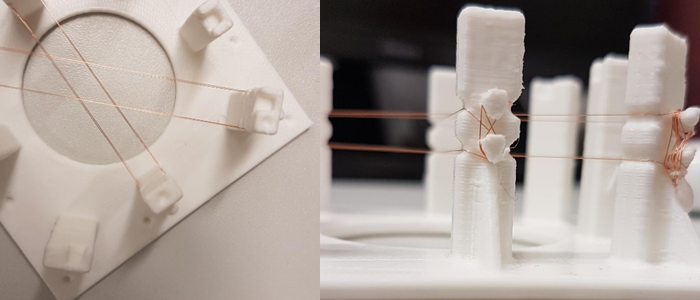
As a first step a model, or phantom, is created using wires and then suspended in an agar gel.
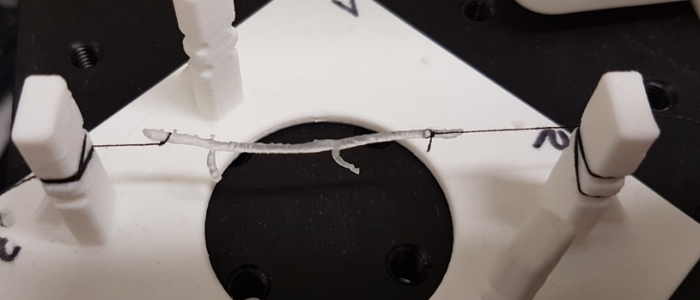
The team in Leeds have gone further to create a more accurate model and used a 3D printer to create a soft polymer phantom of a real artery to be detected using ultrasound.
First published: 16 April 2021